| Symbol |
Description |
Units |
| JDM |
Inertia of drive mechanism |
kg-m2 |
| TDM |
Torque of drive mechanism |
Nm |
| aDM
|
Acceleration of drive mechanism |
rad/s2 |
| h
|
Efficiency of drive mechanism |
1 |
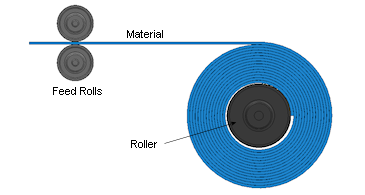
| JR |
Inertia of roller |
kg-m2 |
| rR |
Radius of roller |
m |
| rRM |
Radius of roller with material |
m |
| rMaxRM |
Max radius of roller with material |
m |
| JFR |
Inertia of feed roll |
kg-m2 |
| rFR |
Radius of feed roll |
m |
| nFR |
Number of feed rolls |
|
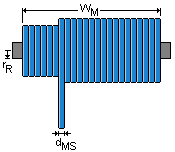
| WM |
Width of material |
m |
| rM
|
Density of material |
kg/m3 |
| FThrust |
Thrust force |
N |
| FTension |
Web tension |
N |
| dM |
Material thickness |
m |
| dMS |
Material diameter for spooling |
m |
| JLoad |
Inertia of payload |
kg-m2 |