
Servo System Optimization: Better Performance for No Cost
“Something for nothing” violates the laws of nature… but smart motion profile designs can almost do exactly that."
 Most pick and place applications are driven by move time. How fast can the robot move from point A to B and back again. This is achieved by aggressive acceleration and deceleration ramps, reaching the highest possible velocity. This requires high motor peak torque at high speed, which results in high peak power. Therefore, quite often in pick and place applications, the limiting factor in sizing electrical components is the rated peak power of the infeed module. Additionally, components with higher rated peak power are disproportionately more expensive, require more cabinet space, as well as larger and more expensive auxiliary components such as chokes, filters and cables.
Most pick and place applications are driven by move time. How fast can the robot move from point A to B and back again. This is achieved by aggressive acceleration and deceleration ramps, reaching the highest possible velocity. This requires high motor peak torque at high speed, which results in high peak power. Therefore, quite often in pick and place applications, the limiting factor in sizing electrical components is the rated peak power of the infeed module. Additionally, components with higher rated peak power are disproportionately more expensive, require more cabinet space, as well as larger and more expensive auxiliary components such as chokes, filters and cables.
Figure 1 illustrates an infeed module (highlighted in yellow) which feeds the DC bus power to 2 axis inverter modules. The infeed module image shows an IGBT which represents a controlled infeed power stage (a.k.a. regulated bus).
This article considers a real world pick and place robot application where the Axis 1 (the robot Z axis) must be as quick as possible for a given stroke. The existing S-curved motion profile traversed 1929mm in 705ms, requiring 255.2Nm of motor torque and over 74.7kW of infeed bus peak power. The maximum jerk value was 365m/s³, which was the empirically determined mechanical stiffness limit of the system.
S-Curve Motion Profile
In typical S-curved motion profiles, the peak power occurs at maximum torque and near or at maximum velocity. As Figure 2 below illustrates, the Infeed Bus Peak power is 75kW (see profile ‘Bus W’) occurs at 0.25s, where the motor is applying maximum torque (see profile ‘Mot Nm’) nearing maximum velocity of the motion profile (see profile ‘Load m/s’). Note that this exeeds the Infeed max rated bus power of 70kW.
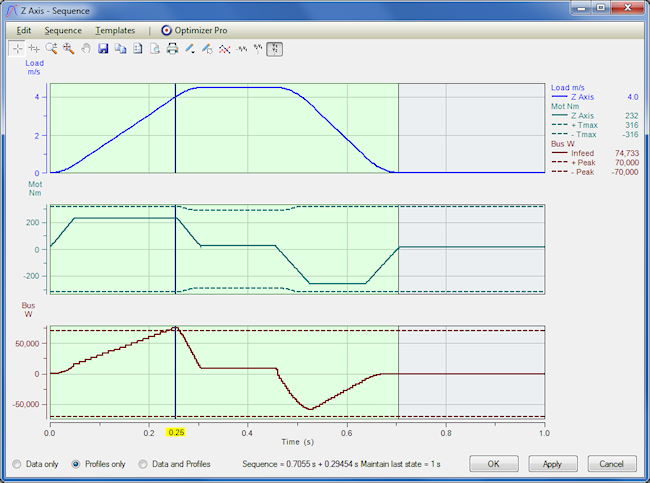
Figure 2: S-curve Motion Profile
The traditional S-curve motion profile is available in most motion controllers. It is relatively straight forward to calculate and allows for a jerk or S-curve value that ‘softens’ the acceleration ramp so as not to load and unload the mechanical system too rapidly. When little or no S-curved value is applied, the result is undesired oscillations, increased mechanical wear on components, and increased settling time as the axis works to reach its target position. After all, time is money. So an S-curve profile has significant benefits, especially with respect to the traditional non S-curved profile.
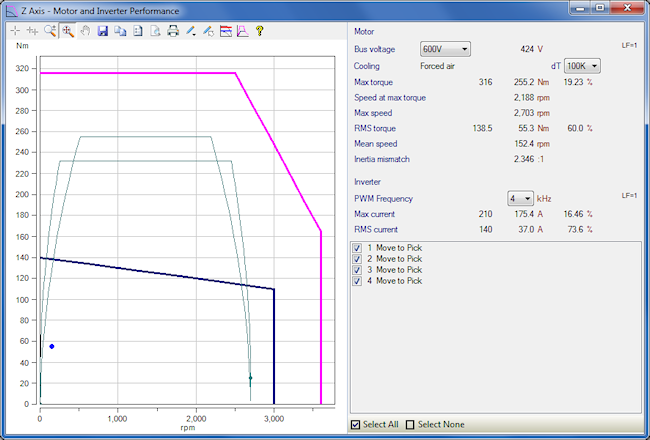
Figure 3: Motor Torque vs Speed (S-curve)
It is always wise to look at a problem from several points of view. In this case, it is good to look at this sample application using Motor Torque vs Speed and Motor Power vs Speed charts in Figures 3 and 4, respectively. The thick pink line represents the motor rated peak torque curve. The thick blue line represents the motor rated continuous torque curve. The thin green lines represent the application motion profiles. And the blue dot represents the application rms torque.
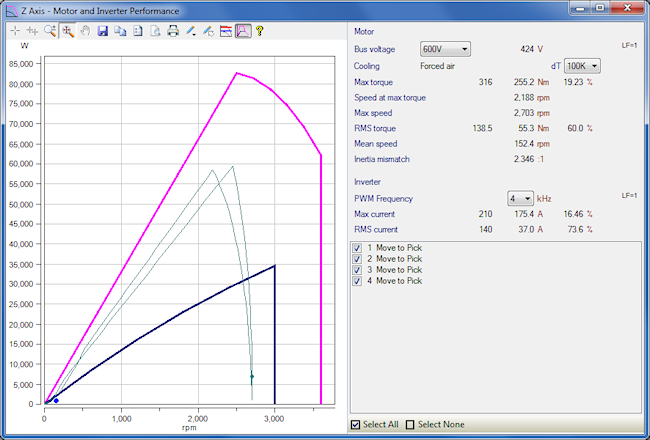
Figure 4: Motor Power vs Speed (S-curve)
So in this application, what is clearly illustrated in the Motor Power vs Speed chart is the 60kW of mechanical peak power. The S-curve motion profile has many advantages, but depending on the available infeed modules of a specific vendor’s products, a product gap can require an upsizing of the infeed module, to meet the incremental peak power requirements of the axis. In this particular application, the infeed module’s rated peak power is 70kW, and the next available size up is 91kW, at a significant increase in cost.
Modified Sine Motion Profile
In this application, the goal was to use the existing components and reduce the peak power. So the result was the Modified Sine motion profile as shown in Figure 5.
The remarkable result here is that the same move time of 705ms is achieved, using 252.5Nm of motor torque (slightly less than before), but using 54.3kW of infeed bus peak power instead of 74.7kW. This is a 27% reduction in bus peak power compared to the existing S-curved motion profile.
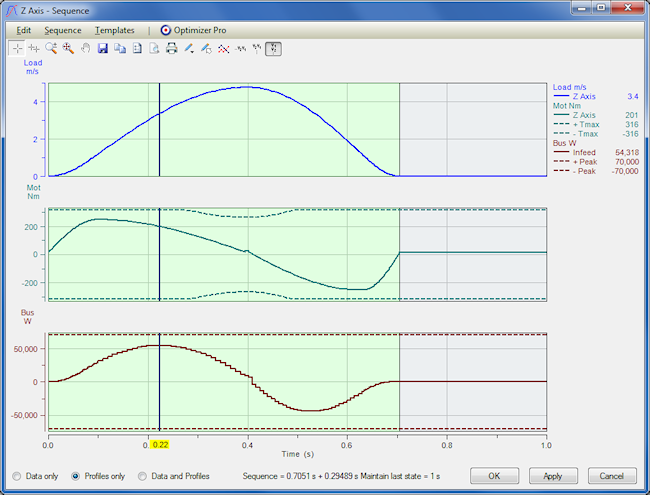
Figure 5: Modified Sine Motion Profile
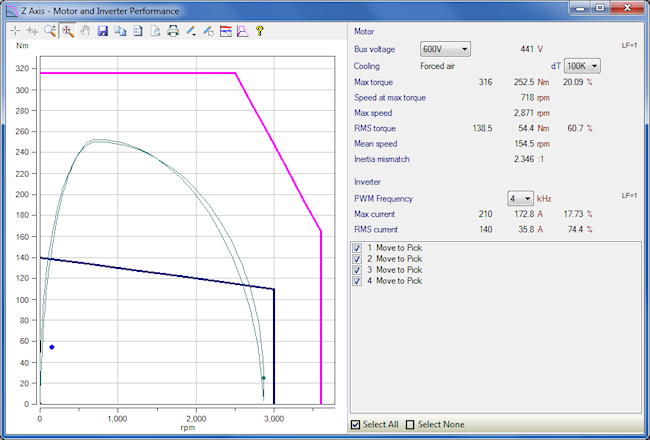
Figure 6: Motor Torque vs Speed (Modified Sine)
The Motor Torque vs Speed and Motor Power vs Speed charts (see Figures 6 and 7) show how the torque and power distribution is ‘front loaded’ at lower speeds using the Modified Sine profile. Even the peak current was reduced slightly from 175.4A to 172.8A.
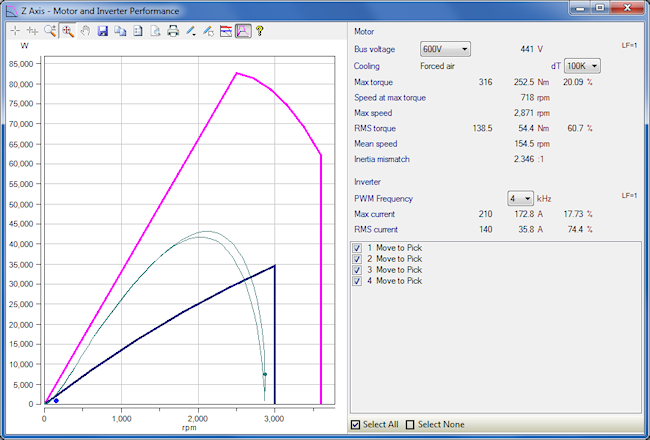
Figure 7: Motor Power vs Speed (Modified Sine)
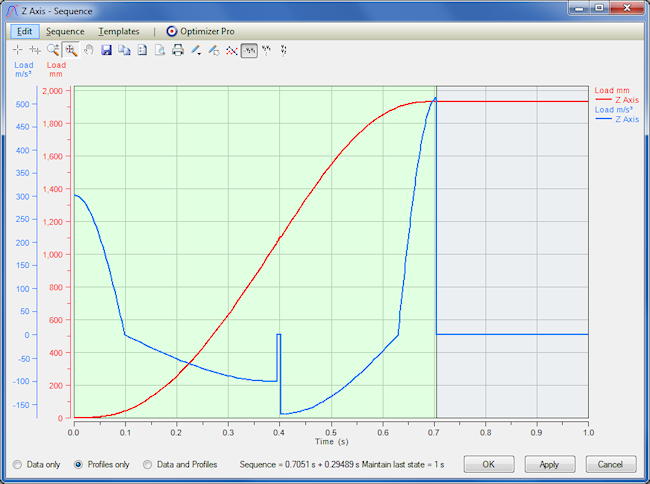
Figure 8: Modified Sine Position & Jerk Profiles
Conclusion
So where is the tradeoff? For 1925mm of the 1929mm motion profile, the jerk value is less than 365m/s³ (see Figure 8). It is just the final 4mm where the jerk value ramps up above 365m/s³ to 513m/s³. But this is a none issue since the jerk value remains well below 365m/s³ for almost the entire motion profile, thus loading the mechanical system more softly than the S-curve profile, and therefore allowing the axis to quickly position the final 4mm with relative ease. So the net improvement is dramatic. A 27% reduction in peak power while mainting the same peak torque and move time!