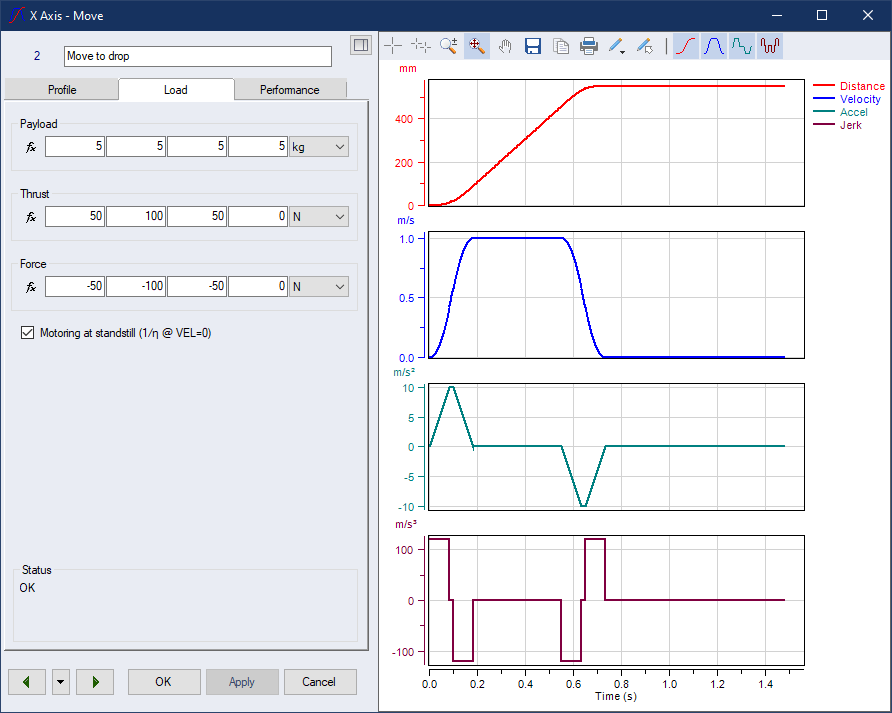
Payload, Thrust & Force/Torque |
The Payload, Thrust and Torque/Force values are specified for each move segment - Accel, Constant Velocity, Decel and Dwell segments.
Payload is a mass (linear load) or inertia (rotary load) in addition to the mechanism load mass/inertia. For example, the Payload can be used in the part of a sequence when a robot picks up a payload.
Thrust is a force (linear load) or torque (rotary load) in addition to the mechanism thrust force/torque. For example, the Thrust can be used to model an additional friction or cutting force.
Force/Torque (linear/rotary) is similar to Thrust, but with one important difference. Force/Torque is a vector that is independent of the direction of motion.
Click on the ![]() button to switch
between Steps and the Load
Formula.
button to switch
between Steps and the Load
Formula.
|
Thrust always acts opposite to the direction of motion. Therefore, if Thrust > 0 during acceleration, Thrust is hurting. If Thrust > 0 during deceleration, Thrust is helping to decelerate. Force / Torque is a vector that is independent of the direction of motion. |
Motoring at Standstill provides the option to specify the mechanism is "Motoring" at standstill, meaning that it is applying the Thrust/Torque/Force, and therefore, the efficiency is [1/n]. When unchecked, the mechanism efficiency is [n].