Shared Bus - Infeed Module, Single Supply, Regenerative Regulated Bus |
Consider a typical 3-axis gantry robot application in a shared bus configuration with the following:
|
Line rectifier power module with a regulated bus |
|
|
Inverter module |
|
|
Inverter module |
|
|
Inverter module |
|
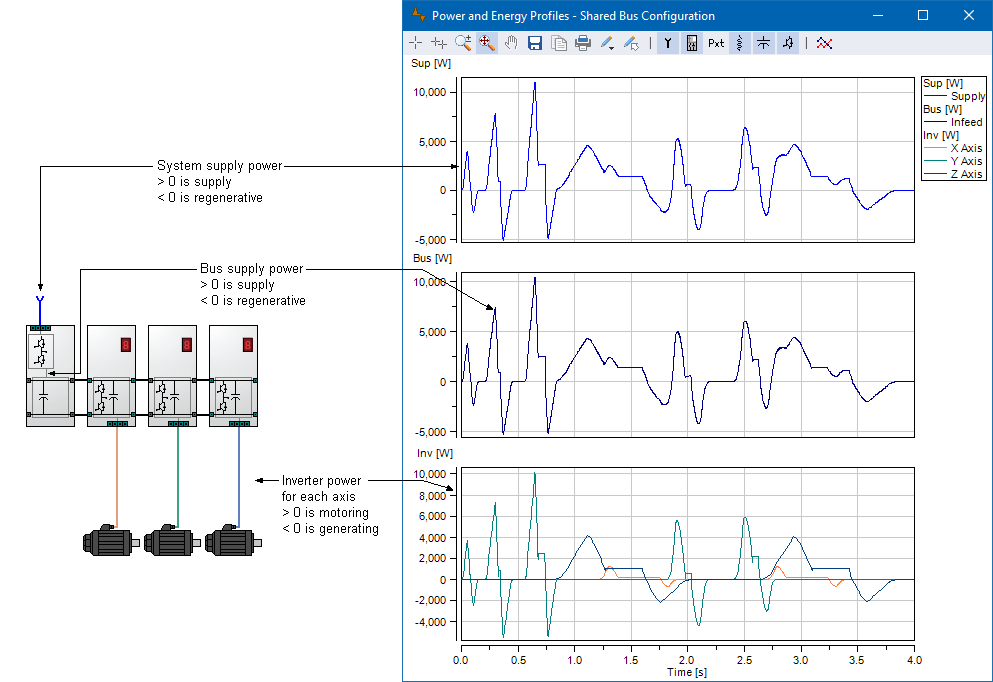
The total power the servo system draws or regenerates to the
supply connection |
|
The supply power to the bus from the infeed module |
|
The inverter power to and from the motor |