Last Formel |
| 'Last Formel' ist in der PRO-Version für die Payload, Thrust & Kraft/Drehmoment-Formel sowie in der Fr-, Fa-, rUL- und mUL-Formel für den Rotierendmechanismus verfügbar. |
Erstellen Sie eine Lastformel, um komplexe dynamische Lasten zu modellieren, die ein Funktion von Position, Entfernung, Geschwindigkeit, Beschleunigung und Zeit sein können. In der Tabelle unten werden die Variablen, Rechenarten und Funktionen aufgeführt, die bei der Erstellung einer Lastformel für eine Last verwendet werden können.
|
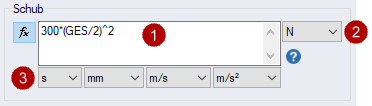
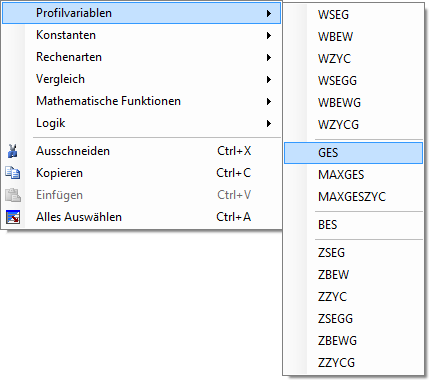
Formel Textbox Klicken Sie in der Formel Textbox mit der rechten Maustaste und es wird ein Dropdown-Menü angezeigt, das die Profil- Variablen, Konstanten, arithmetische, Vergleiche und math-Funktionen anzeigt. |
|||||||||||||||||
| Einheiten für das Formelergebnis | |||||||||||||||||
|
Einheiten für die in der Formel verwendeten Variablen
|
1. Erstellen Sie eine einfache Schubformel; bei der der Schub 100 mal das Quadrat der Geschwindigkeit beträgt:
2. Erstellen Sie ein etappenweises Schubprofil unter Verwendung der Formel:
In der Formel Textbox mit der rechten Maustaste klicken, es wird ein Dropdown-Menü mit Profil Variablen, Konstanten, arithmetische, Vergleiche und math-Funktionen angezeigt.
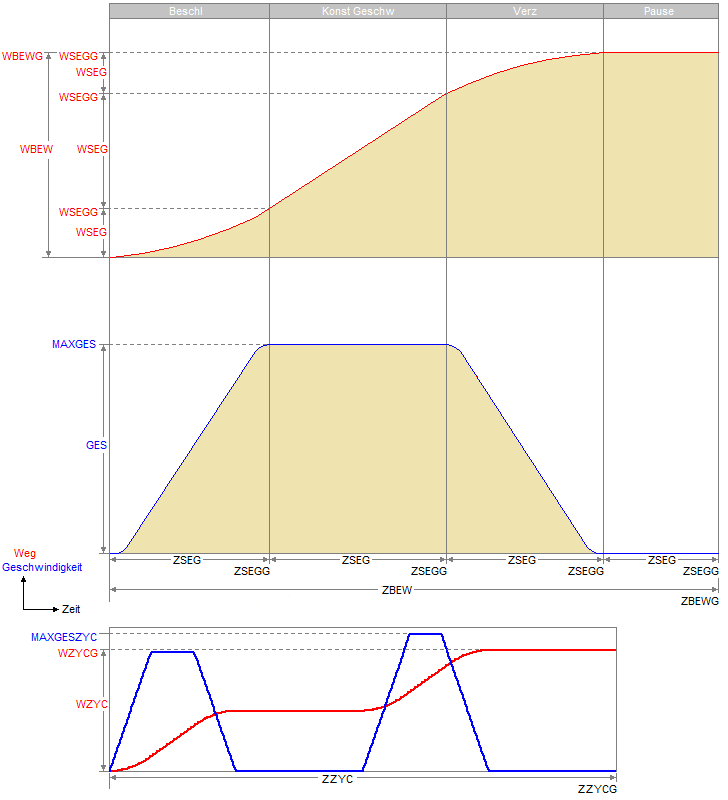
| Profilvariablen | Einheiten | |||||||||||||||||||||
| WSEG | Entfernung im Abschnitt | Linear: m, mm, in Rotierend: °, rad, U |
||||||||||||||||||||
| WBEW | Entfernung in der Bewegung | Linear: m, mm, in Rotierend: °, rad, U |
||||||||||||||||||||
| WZYC | Entfernung im Zyklus/Sequenz | Linear: m, mm, in Rotierend: °, rad, U |
||||||||||||||||||||
| WSEGG | Entfernung Abschnitt Gesamt | Linear: m, mm, in Rotierend: °, rad, U |
||||||||||||||||||||
| WBEWG | Entfernung Bewegung Gesamt | Linear: m, mm, in Rotierend: °, rad, U |
||||||||||||||||||||
| WZYCG | Entfernung Zyklus/Sequenz Gesamt | Linear: m, mm, in Rotierend: °, rad, U |
||||||||||||||||||||
| GES | Geschwindigkeit | Linear: m/s, mm/s, in/s Rotierend: °/s, rad/s, rev/s |
||||||||||||||||||||
| MAXGES | Maximum Geschwindigkeit im
Abschnitt/Bewegung Immer ein positiver Wert Dh. MAXGES = Max(Abs(GES)) im Abschnitt/Bewegung |
Linear: m/s, mm/s, in/s Rotierend: °/s, rad/s, rev/s |
||||||||||||||||||||
| MAXGESZYC | Maximum Geschwindigkeit im
Zyklus/Sequenz Immer ein positiver Wert D.h. MAXGESZYC = Max(Abs(GES)) im Zyklus/Sequenz |
Linear: m/s, mm/s, in/s Rotierend: °/s, rad/s, rev/s |
||||||||||||||||||||
| BES | Beschleunigung | Linear: m/s2, mm/s2,
in/s2 Rotierend: °/s2, rad/s2, rev/s2 |
||||||||||||||||||||
| ZSEG | Zeit im Abschnitt | s | ||||||||||||||||||||
| ZBEW | Zeit in der Bewegung | s | ||||||||||||||||||||
| ZZYC | Zeit im Zyklus/Sequenz | s | ||||||||||||||||||||
| ZSEGG | Zeit Abschnitt Gesamt | s | ||||||||||||||||||||
| ZBEWG | Zeit Bewegung Gesamt | s | ||||||||||||||||||||
| ZZYCG | Zeit Zyklus/Sequenz Gesamt | s | ||||||||||||||||||||
| Konstanten | ||||||||||||||||||||||
| PI | Pi (3.14159265358979...) | |||||||||||||||||||||
| Rechenarten | ||||||||||||||||||||||
| + | Addition | |||||||||||||||||||||
| - | Subtraktion | |||||||||||||||||||||
| * | Multiplikation | |||||||||||||||||||||
| / | Division | |||||||||||||||||||||
| \ | Ganzzahldivision | |||||||||||||||||||||
| ^ | Exponentiation (Potenzierung) | |||||||||||||||||||||
| Mod |
Arithmetischer Teilungsrest
|
|||||||||||||||||||||
| Wenn Multiplikations- und Divisionsvorgänge in einem Ausdruck gemeinsam vorkommen, wird jede Operation so, wie sie auftritt, von links nach rechts berechnet. Gleichermaßen werden, wenn Additionen und Subtraktionen in einem Ausdruck gemeinsam vorkommen, alle Operationen in der Reihenfolge ihres Auftretens von links nach rechts berechnet. | ||||||||||||||||||||||
| Vergleich | ||||||||||||||||||||||
| = | Gleichheit | |||||||||||||||||||||
| <> | Ungleichheit | |||||||||||||||||||||
| < | Kleiner als | |||||||||||||||||||||
| > | Größer als | |||||||||||||||||||||
| <= | Kleiner oder gleich | |||||||||||||||||||||
| >= | Größer oder gleich | |||||||||||||||||||||
| Is | Objektäquivalenz | |||||||||||||||||||||
|
Wenn der Vergleich wahr ist, ist das Ergebnis der Wert 1. Z.B. (3>2)=1 Wenn der Vergleich falsch ist, ist das Ergebnis der Wert 0. Z.B. (1>2)= 0 |
||||||||||||||||||||||
| Mathematische Funktionen | Einheiten | |||||||||||||||||||||
| Abs | Absolutwert Bsp. Abs(-1)=1 |
|||||||||||||||||||||
| Atn | Arkustangens Bsp. Atn(1)=PI/4 |
|||||||||||||||||||||
| Cos | Cosinuswert eines Winkels Bsp. Cos(PI/4)=0.707106781... |
[rad] | ||||||||||||||||||||
| Exp | e hoch die Zahl Bsp. Exp(1)= e= 2.718281828459... |
|||||||||||||||||||||
| Log | Natürlicher Logarithmus Kann kombiniert werden, um den Log einer jeden Basis n zu erzeugen. Bsp. Logn(x) = Log(x) / Log(n) |
|||||||||||||||||||||
| Sgn | Signum = Vorzeichen einer Zahl x>0: Sgn(x)= 1, x= 0: Sgn(x)= 0, x<0: Sgn(x)= -1 |
|||||||||||||||||||||
| Sin | Sinuswert eines Winkels Bsp. Sin(PI/4)=0.707106781... |
[rad] | ||||||||||||||||||||
| Sqr | Quadratwurzel Bsp. Sqr(9)=9^½=3 |
|||||||||||||||||||||
| Tan | Tangenswert eines Winkels Bsp. Tan(PI/4)=1 |
[rad] | ||||||||||||||||||||
| Int | Ganzzahliger Anteil einer Zahl1 | |||||||||||||||||||||
| Fix | Ganzzahliger Anteil einer Zahl1 | |||||||||||||||||||||
| 1Der Unterschied zwischen Int und Fix besteht darin, dass Int bei einer negativen Zahl die erste negative ganze Zahl, wiedergibt, die kleiner oder gleich der Zahl ist, Fix dagegen die erste negative ganze Zahl, die größer oder gleich der Zahl ist. So wandelt z. B. Int -8,4 in -9 um, während Fix für -8,4 -8 liefert. | ||||||||||||||||||||||
| Logik | ||||||||||||||||||||||
| And | Logische Verknüpfung | |||||||||||||||||||||
| Not | Logische Verneinung | |||||||||||||||||||||
| Or | Logische Disjunktion | |||||||||||||||||||||
| Xor | Logischer Ausschluss | |||||||||||||||||||||
| Eqv | Logische Äquivalenz | |||||||||||||||||||||
| Imp | Logische Implikation | |||||||||||||||||||||
| Abgeleitete Mathematische Funktionen | |
| Secans | Sec(X) = 1 / Cos(X) |
| Cosecans | Cosec(X) = 1 / Sin(X) |
| Cotangens | Cotan(X) = 1 / Tan(X) |
| Arcussinus | Arcsin(X) = Atn(X / Sqr(-X * X + 1)) |
| Arcuscosinus | Arccos(X) = Atn(-X / Sqr(-X * X + 1)) + 2 * Atn(1) |
| Arcussecans | Arcsec(X) = 2 * Atn(1) – Atn(Sgn(X) / Sqr(X * X – 1)) |
| Arcuscosecans | Arccosec(X) = Atn(Sgn(X) / Sqr(X * X – 1)) |
| Arcuscotangens | Arccotan(X) = 2 * Atn(1) - Atn(X) |
| Sinus hyperbolicus | HSin(X) = (Exp(X) – Exp(-X)) / 2 |
| Cosinus hyperbolicus | HCos(X) = (Exp(X) + Exp(-X)) / 2 |
| Tangens hyperbolicus | HTan(X) = (Exp(X) – Exp(-X)) / (Exp(X) + Exp(-X)) |
| Secans hyperbolicus | HSec(X) = 2 / (Exp(X) + Exp(-X)) |
| Cosecans hyperbolicus | HCosec(X) = 2 / (Exp(X) – Exp(-X)) |
| Cotangens hyperbolicus | HCotan(X) = (Exp(X) + Exp(-X)) / (Exp(X) – Exp(-X)) |
| Arcussinus hyperbolicus | HArcsin(X) = Log(X + Sqr(X * X + 1)) |
| Arcuscosinus hyperbolicus | HArccos(X) = Log(X + Sqr(X * X – 1)) |
| Arcustangens hyperbolicus | HArctan(X) = Log((1 + X) / (1 – X)) / 2 |
| Arcussecans hyperbolicus | HArcsec(X) = Log((Sqr(-X * X + 1) + 1) / X) |
| Arcuscosecans hyperbolicus | HArccosec(X) = Log((Sgn(X) * Sqr(X * X + 1) + 1) / X) |
| Arcuscotangens hyperbolicus | HArccotan(X) = Log((X + 1) / (X – 1)) / 2 |
| Logarithmus zur Basis N | LogN(X) = Log(X) / Log(N) |