Zuladung, Schub und Kraft / Drehmoment |
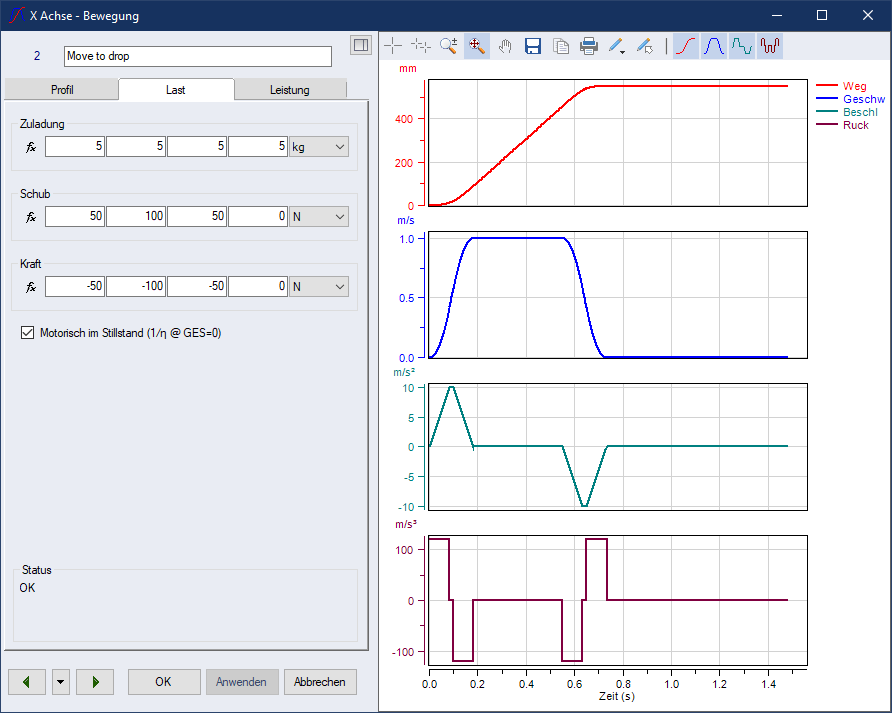
Der Zuladung, Schub und Kraft / Drehmoment werte werden für alle Bewegungssegmente ausgewiesen - Beschleunigung, Konstanter Geschwindigkeits, Verzögerung und Pause segmente.
Die Zuladung ist eine Masse (lineare Last) oder Trägheit (Rotationsbelastung) zusätzlich zu der Mechanismus Last Masse / Trägheit. Zum Beispiel kann die Nutzlast im Teil einer Sequenz verwendet werden, wenn ein Roboter eine Zuladung aufnimmt.
Schub ist eine Kraft (lineare Last) oder Drehmoment (Drehlast) zusätzlich zu der Mechanismus Schubkraft / Drehmoment. Zum Beispiel kann der Schub verwendet werden, um eine zusätzliche Reib- oder Schneidkraft zu modellieren.
Kraft / Drehmoment (linear / rotierend) ist ähnlich wie Schub, jedoch mit einem wichtigen Unterschied. Drehmoment / Kraft ist ein Vektor der unabhängig von der Bewegungsrichtung ist.
Klicken Sie auf die Schaltfläche ![]() , um zwischen den Schritten und der
Last Formel zu wechseln.
, um zwischen den Schritten und der
Last Formel zu wechseln.
|
Der Schub wirkt stets entgegen der Fahrtrichtung. Daher leidet der Schub, wenn er während des Beschleunigens > 0 ist. Ist der Schub beim Abbremsen > 0 so unterstützt der den Bremsvorgang. Kraft / Drehmoment ist ein Vektor, der unabhängig von der Bewegungsrichtung ist. |
Motorisch im Stillstand bietet die Option, den Mechanismus als „Motorisch“ im Stillstand anzugeben, was bedeutet, dass Schub/Drehmoment/Kraft angewendet werden und der Wirkungsgrad daher [1/n] beträgt. Wenn nicht markiert, ist die Mechanismuseffizienz [n].