Linear Motor
|
|
|
Force profile for each move segment |
|
The RMS force is a thermal equivalent to be compared with a motor continuous thermal limit.
For simplicity, the above example does not include jerk.
In actuality, the acceleration and deceleration force ramps are
each subdivided into many samples, allowing a more precise RMS
force calculation for S-curved and CAM profiles. |
|
|
|
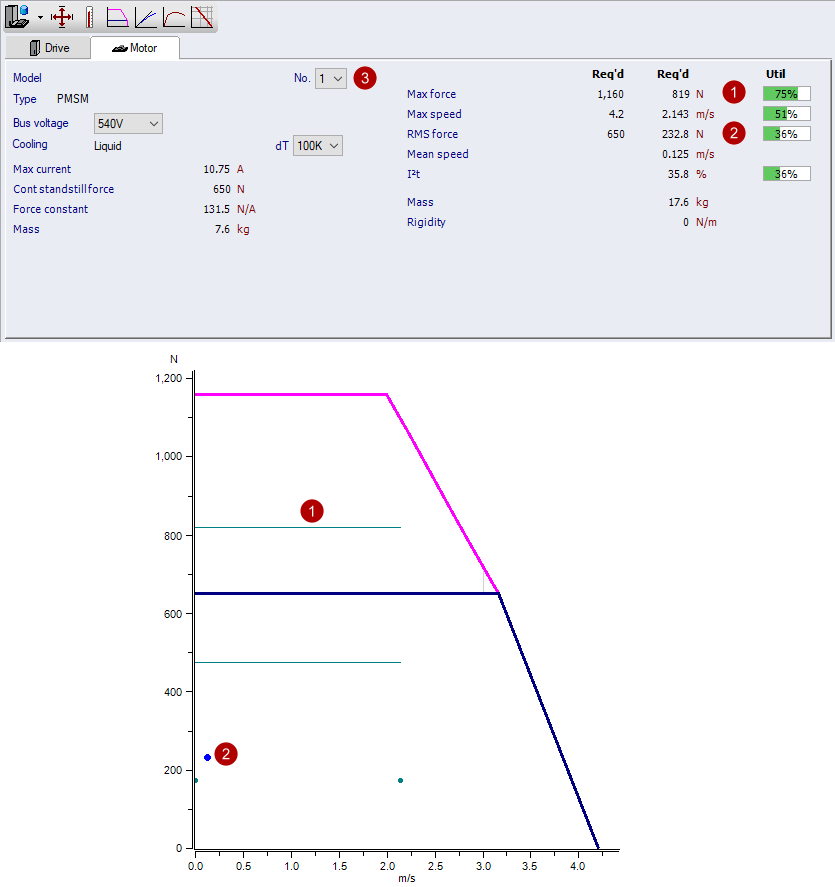
Specifiy the number of primary parts |